Robots are becoming increasingly prevalent in our daily lives, from household chores to industrial tasks. In order for robots to be truly effective in various environments, they must be able to grasp and manipulate a wide range of objects with precision. Recent advancements in machine learning have opened up new possibilities for training robots to perform these tasks efficiently. However, the traditional approach of pre-training models on visual data alone may not be sufficient for optimal performance.
In a groundbreaking study conducted by researchers at Carnegie Mellon University and Olin College of Engineering, the use of contact microphones as an alternative to conventional tactile sensors was investigated. By leveraging audio data collected from contact microphones, the researchers aimed to pre-train machine learning models for robot manipulation in a multi-sensory manner. This novel approach could potentially revolutionize the field of robotics by broadening the scope of pre-training beyond visual data.
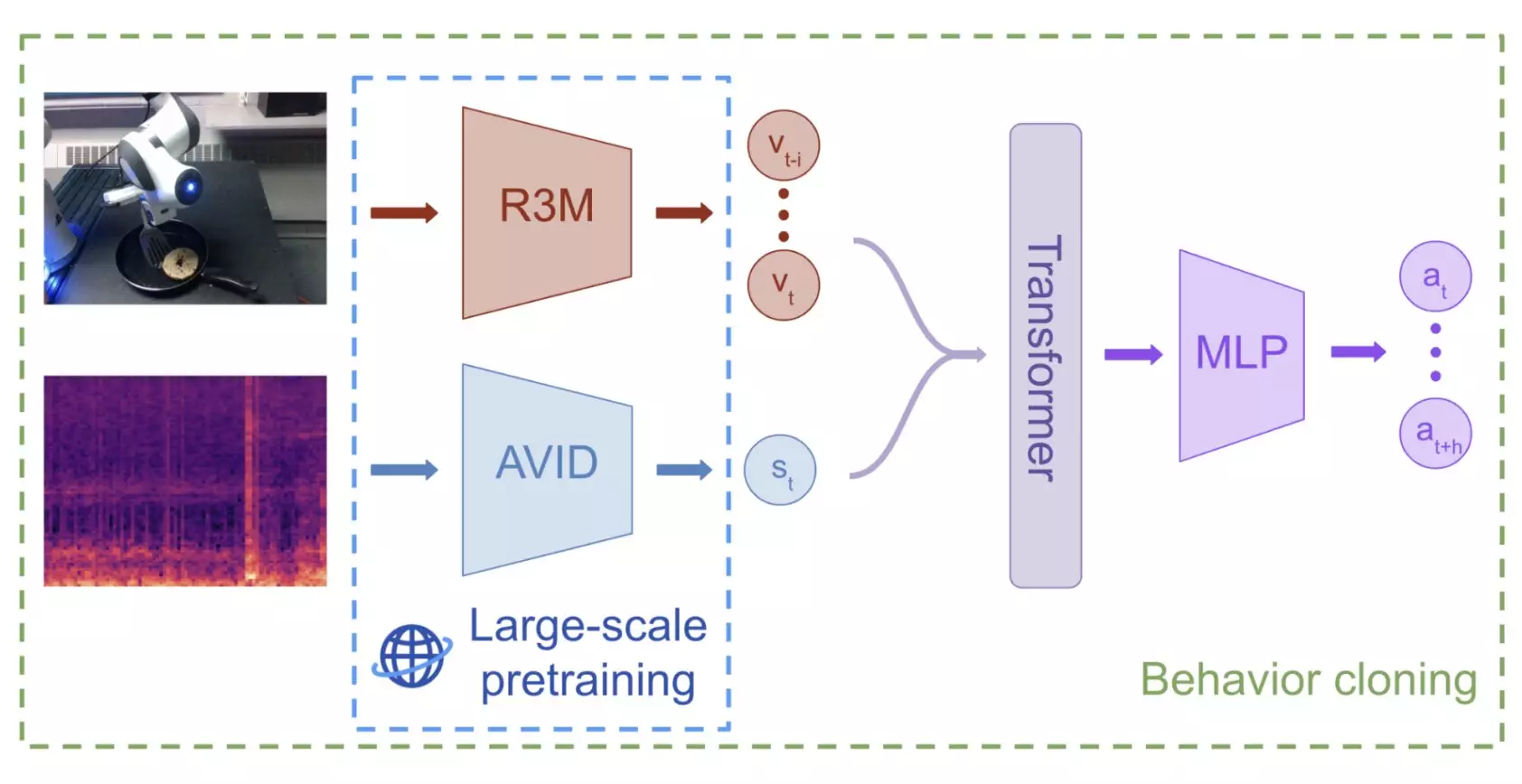
The researchers pre-trained a self-supervised machine learning model on audio-visual representations from the Audioset dataset, which consists of millions of audio clips sourced from the internet. This model, based on audio-visual instance discrimination (AVID), was able to learn to differentiate between various types of audio-visual data. Subsequently, the model was put to the test in real-world manipulation tasks, where it outperformed models trained solely on visual data.
The study by Mejia, Dean, and their colleagues highlighted the effectiveness of leveraging multi-sensory pre-training for robotic manipulation. By utilizing contact microphones to capture audio-based information, the researchers were able to enhance the robot’s performance in diverse manipulation tasks. This approach represented a significant step forward in the development of pre-trained multimodal machine learning models for robotics applications.
Looking ahead, the insights gained from this study could pave the way for further advancements in the field of robot manipulation. The proposed approach may be refined and tested across a broader range of tasks to assess its scalability and adaptability. Future research could also delve into identifying the key characteristics of pre-training datasets that are most conducive to learning audio-visual representations for manipulation policies.
The study by Mejia, Dean, and their colleagues underscores the importance of embracing multi-sensory pre-training in the realm of robot manipulation. By expanding the scope of data sources beyond visual inputs, researchers can unlock new possibilities for enhancing the capabilities of robotic systems. This innovative approach could yield significant advancements in the field of robotics and pave the way for the development of more versatile and adaptive robots in the future.
Leave a Reply