For nearly seven decades, mechanical ingenuity has shaped the world of robotics, resulting in machines that, despite remarkable advancements, have shared a common limitation: reliance on traditional motor systems. These motors, rooted in technology that’s over two centuries old, drive countless robotic applications, from industrial automation to collaborative robots in various environments. However, a groundbreaking development from the Max Planck ETH Center for Learning Systems (CLS) signals a transformative shift. Researchers at ETH Zurich and the Max Planck Institute for Intelligent Systems (MPI-IS) have successfully designed a muscle-powered robotic leg that offers newfound energy efficiency and maneuverability, suggesting a future where robots can emulate the natural adaptability of living organisms.
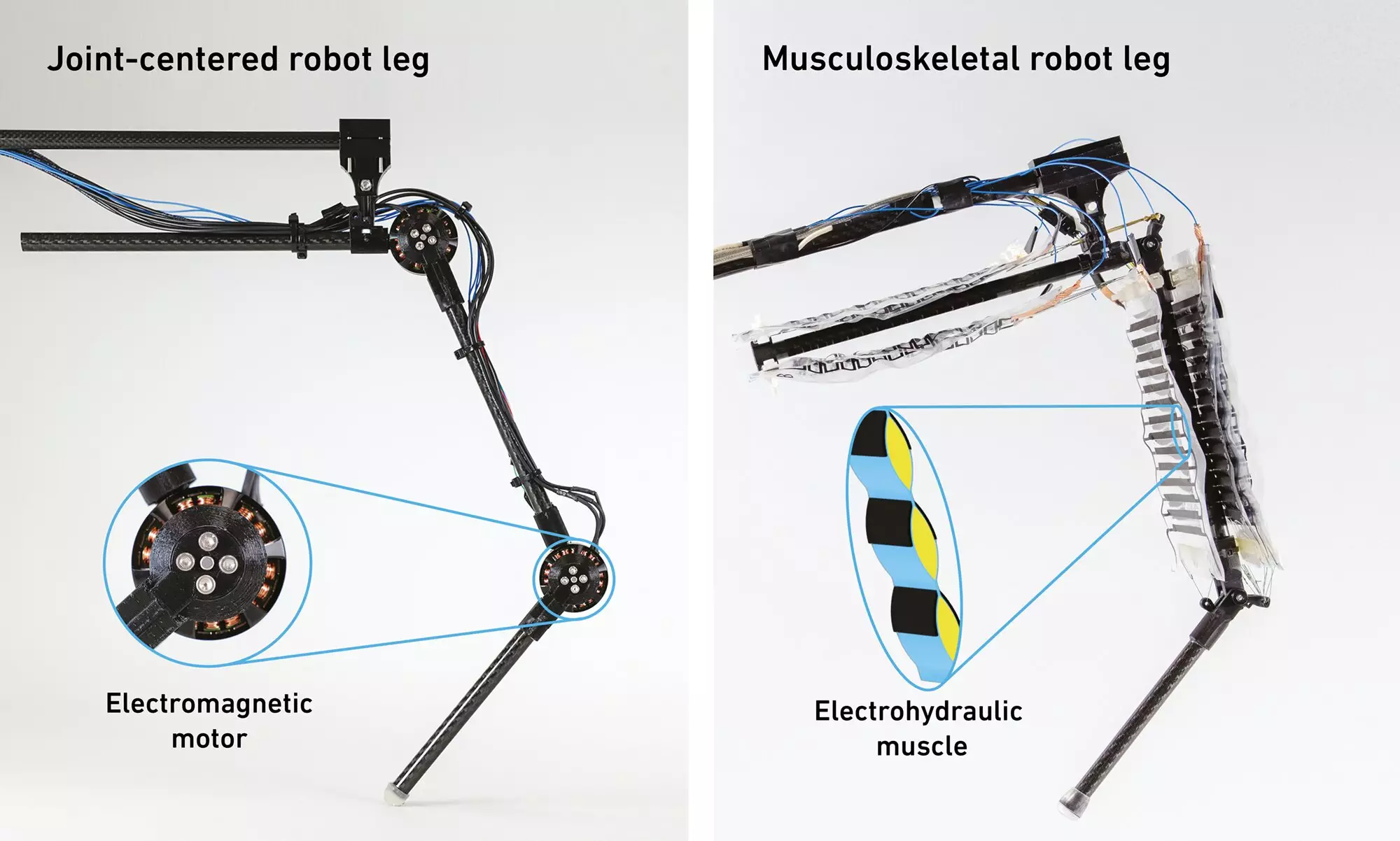
One of the primary inspirations behind this new robotic leg is the sophisticated musculoskeletal system of animals and humans. The research, spearheaded by Robert Katzschmann and Christoph Keplinger, strives to replicate the functionality of biological limbs. Traditional robotic legs utilize motors that can impede fluid motion and dynamic responses, but the novel design employs electro-hydraulic actuators known as HASELs, which mimic the actions of human flexor and extensor muscles.
These actuators operate on principles akin to static electricity, demonstrating remarkable energy management. No longer burdened by the excessive heat dissipation commonly experienced in motor-driven systems, the muscle-powered leg maintains a consistent temperature during operation. This maximizes efficiency and reduces the need for cumbersome cooling systems, allowing for a more compact and versatile design.
The efficiency of this innovative leg design has been rigorously tested against conventional robotic legs. The results reveal a significant reduction in energy loss, particularly in scenarios requiring sustained postures, such as maintaining a bent position. While traditional motors waste substantial energy through heat generation, the HASEL design operates more intelligently, effectively reducing unnecessary energy expenditure.
This enhancement in performance becomes apparent when examining the robotic leg’s jumping capabilities and its capacity for rapid, fluid motion. The ability to respond with agility to various stimuli effectively positions this leg as a formidable advancement in soft robotics, where adaptability is paramount in navigating uneven terrains or obstacles without specialized sensors.
Key to the functionality of the muscle-powered leg is its inherent adaptability, a critical feature often lacking in traditional robotic designs that depend on complicated sensor systems. By utilizing a simple two-input command mechanism—one for extension and one for contraction—the robotic leg autonomously adjusts its positioning in real-time, much like humans instinctively adjust their knees when landing from a jump.
This groundbreaking feature highlights the central thesis of the research: that robotic systems can function more efficiently when they mirror the adaptability found in biological entities. The implications of this adaptability extend far beyond mobility, offering possibilities for robotics in unpredictable environments, such as disaster response scenarios or search-and-rescue operations.
Despite its promising capabilities, the muscle-powered robotic leg is still in its formative stages and has limitations compared to fully electric systems. Currently, the leg’s mobility is confined to predefined operations—jumping in circular motions attached to a rod—highlighting the urgent need for further research to facilitate free movement akin to that of biological organisms.
Experts acknowledge the vast potential of electro-hydraulic technology, particularly for applications requiring nuanced movements, such as gripping objects of varying shapes and sizes. While large-scale implementations in heavy machinery remain impractical, specialized applications abound where the benefits of this new technology can shine through.
The evolution of robotic technology is at a pivotal moment with the introduction of muscle-powered innovations like the one developed by the CLS team. While challenges must be addressed before these advancements can be fully realized in everyday applications, the preliminary results underscore a paradigm shift away from conventional motor systems. This breakthrough signals not just an evolution in robotics but a revolution in how machines may operate, interact, and integrate into human environments. As research continues to refine these systems, we stand on the threshold of a future where robots can move with the grace and adaptability of life itself.
Leave a Reply