Robotic systems have seen great advancements in recent years, with widespread deployment in various indoor environments to assist humans with manual tasks and simple queries. However, as technology progresses, the future of robotics lies in their deployment in unknown and unmapped outdoor environments. This transition poses unique challenges, as obstacles can easily occlude sensors, increasing the risk of collisions. Air-ground robots are emerging as a promising solution for navigating complex outdoor settings and tackling a wide range of tasks.
A recent breakthrough by researchers at the University of Hong Kong has led to the development of AGRNav, a cutting-edge framework designed to enhance the autonomous navigation of air-ground robots in occlusion-prone environments. The framework consists of two main components: a lightweight semantic scene completion network (SCONet) and a hierarchical path planner. The SCONet component utilizes deep learning to predict obstacles and their semantic features in the environment. On the other hand, the hierarchical path planner leverages these predictions to plan optimal and energy-efficient aerial and ground paths for the robot to reach its destination.
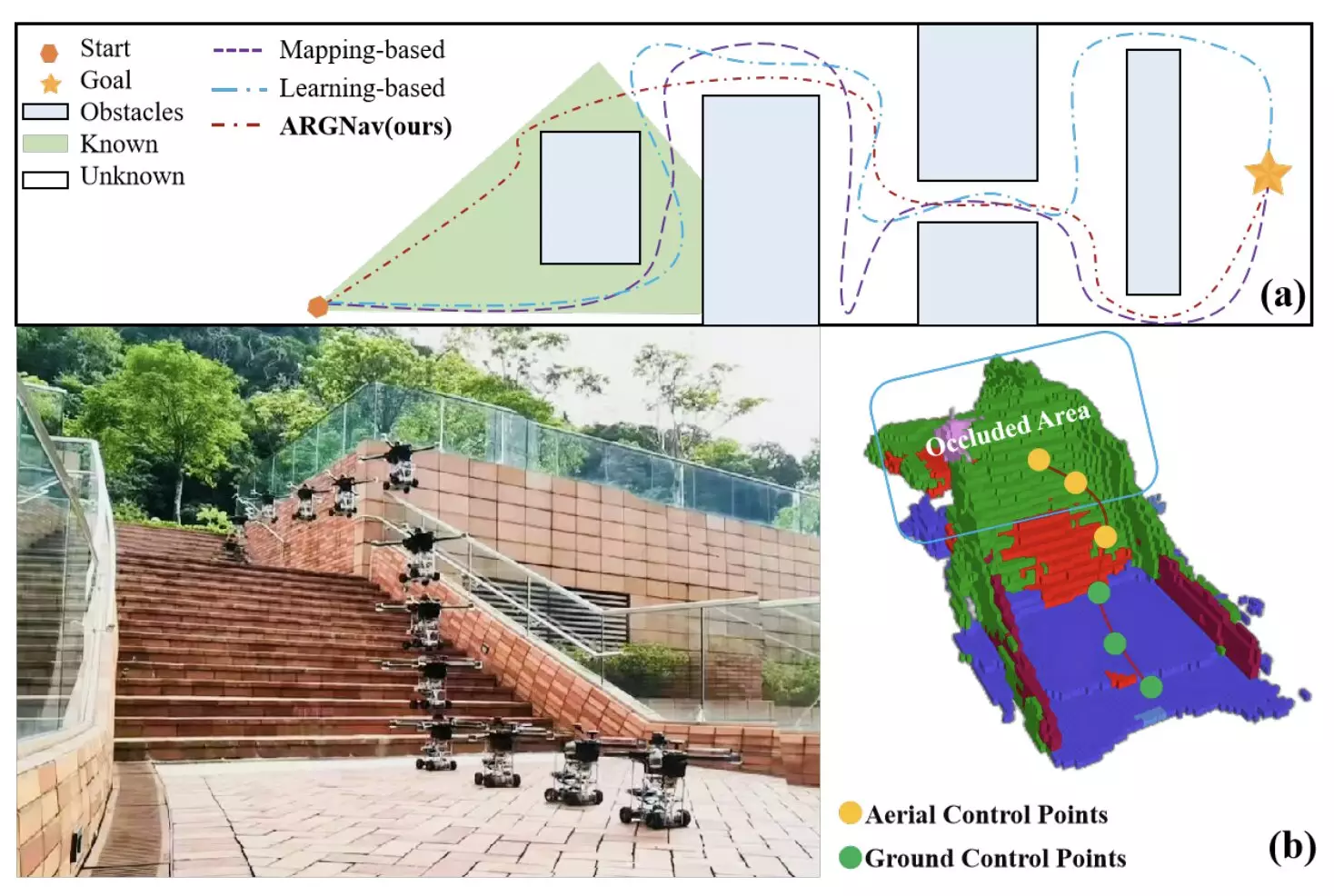
One of the primary objectives of the research team was to address the challenges posed by occluded and unknown regions in complex environments. By accurately predicting unobserved obstacles, AGRNav aims to optimize the trajectory of air-ground robots. The framework employs a self-attention mechanism to capture contextual information and occlusion features, enabling accurate obstacle predictions. Additionally, a query-based method allows for low-latency updates of prediction results to the grid map, facilitating efficient path planning for navigation.
The researchers conducted extensive evaluations of the AGRNav framework in both simulated and real-world environments, utilizing a customized air-ground robot for testing. The results were promising, showing that AGRNav outperformed existing navigation frameworks in identifying optimal and energy-efficient paths for the robot. Furthermore, the underlying code of AGRNav is open-source and available on GitHub, providing developers worldwide with access to this cutting-edge technology. The future deployment and testing of AGRNav on other air-ground robotic platforms hold the potential to revolutionize their effectiveness in real-world environments.
The development of AGRNav represents a significant step towards enhancing the navigation capabilities of air-ground robots in outdoor environments. By addressing the challenges of occlusion-prone settings and optimizing path planning, this framework paves the way for the effective deployment of robotic systems in complex real-world scenarios. As technology continues to evolve, the potential applications of air-ground robots in search and rescue operations, package delivery, environmental monitoring, and other missions are vast. AGRNav stands as a testament to the limitless possibilities of robotics in shaping the future of navigation and automation.
Leave a Reply