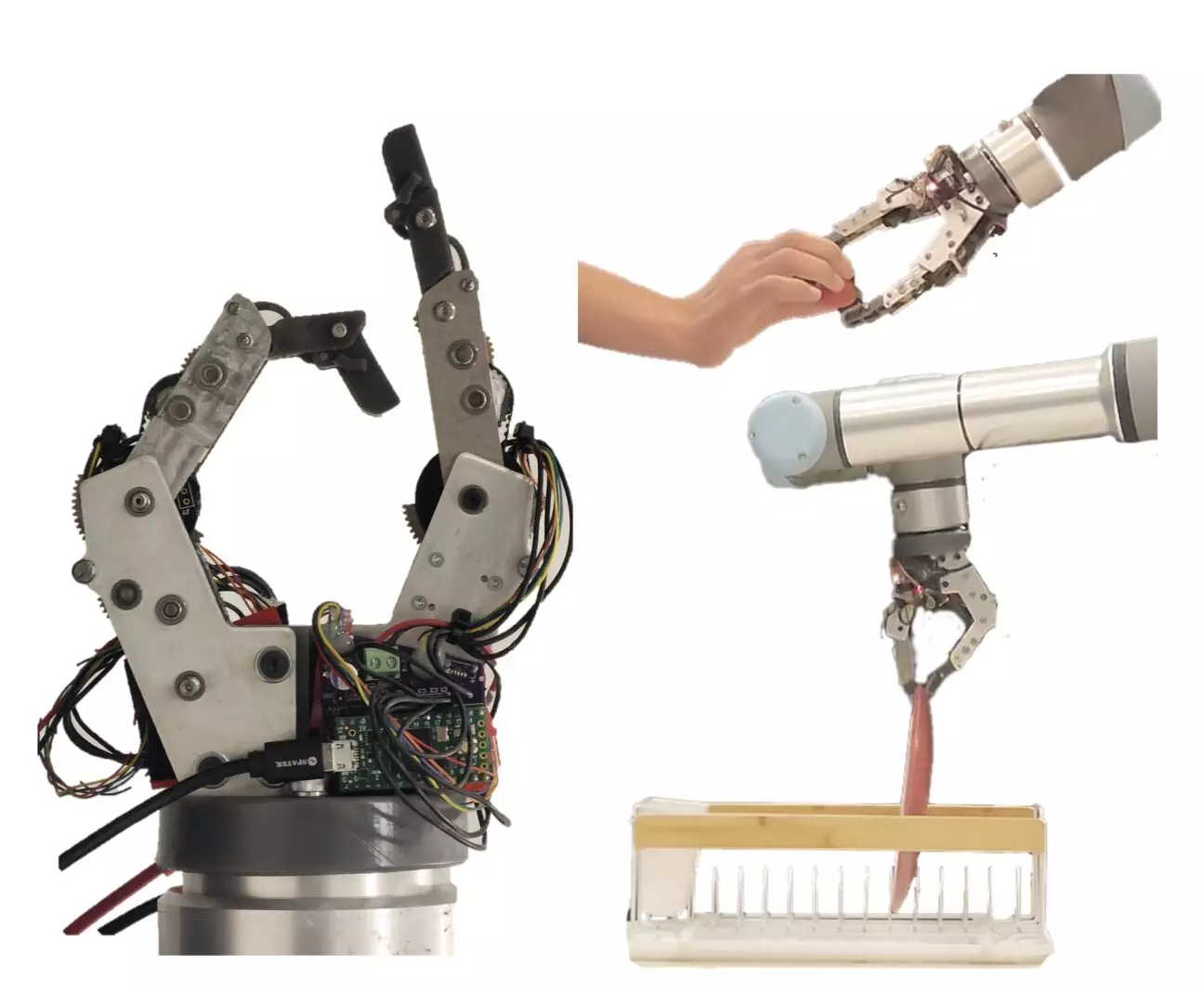
Robots are becoming increasingly integrated into our daily lives, and in order to truly assist humans in a variety of real-world settings, they must possess the ability to manipulate objects effectively and with dexterity. One key component in enabling robots to perform dexterous object manipulation is the development of cost-effective robotic grippers or hand-like artificial systems. Recently, researchers at Improbable AI Lab and Massachusetts Institute of Technology (MIT) have taken a significant step forward in this area by designing a new two-finger robotic gripper that is specifically engineered to handle everyday manipulation tasks more efficiently.
In their paper published on the preprint server arXiv and set to be featured in the IEEE ICRA 2024 proceedings, Rubén Castro Ornelas, Tomás Cantú, and their team describe the mechanical and dynamical requirements necessary for a robotic finger to perform a wide range of everyday tasks. The researchers focused on creating a finger design based on series-elastic actuation, which they refer to as the “everyday finger.” The goal was to make the fingers as compact as possible while still achieving optimal performance for tasks such as picking up objects with varying shapes and textures and accurately placing them in designated locations.
The robotic gripper developed by the researchers consists of a structure with two finger-like appendages that closely resemble human fingers in terms of size and shape. These fingers were engineered to bend and grip objects securely, allowing the gripper to successfully pick up and manipulate objects like dishes, paper, and even delicate items such as strawberries. While the current design features only two degrees of freedom (DoF), the researchers envision the possibility of integrating additional fingers in future iterations. By adding a third DoF, however, the size of the palm would need to be increased, presenting a challenge in fitting multiple fingers onto the hand.
To evaluate the performance of their two-finger robotic gripper, the researchers conducted a series of real-world experiments. These experiments focused on assessing the speed, compliance, and force exerted by the gripper when completing simple “pick-and-place” tasks. Despite the simplicity of these tasks, the results of the experiments were highly promising, with the gripper successfully completing all three tasks with ease. This suggests that the gripper has the potential to be integrated into basic household robots that can assist with a variety of daily tasks.
The design of two-finger robotic grippers represents a significant advancement in the field of robotics and automation. By focusing on creating a compact and versatile finger design capable of performing everyday tasks efficiently, the researchers at Improbable AI Lab and MIT have opened up new possibilities for the development of robots that can seamlessly integrate into our daily lives. Moving forward, it will be important for researchers to continue refining the gripper’s design and testing its performance across a wider range of tasks to further enhance its capabilities. The future of robotics is indeed looking brighter with innovations such as the two-finger robotic gripper paving the way for smarter and more capable robots.
Leave a Reply