Imitation learning is a key method for teaching robots how to perform various tasks, but the challenge lies in collecting detailed human demonstrations that can be replicated by robotic systems. One approach is using teleoperated systems, but many existing systems struggle to accurately reproduce complex movements. Researchers at the University of California, San Diego have recently unveiled Bunny-VisionPro, a revolutionary system designed to enable teleoperation of robots for bimanual dexterous manipulation tasks, ultimately simplifying the collection of human demonstrations for imitation learning.
The primary goal of the researchers led by Xiaolong Wang was to create a teleoperation system that could be easily adapted across different robots and tasks, streamlining the process of collecting demonstration data. Bunny-VisionPro offers a novel solution that integrates intuitive control mechanisms and immersive experiences akin to virtual reality gaming. Wang highlighted the system’s innovative features, emphasizing its ability to facilitate high-quality demonstration collection for imitation learning.
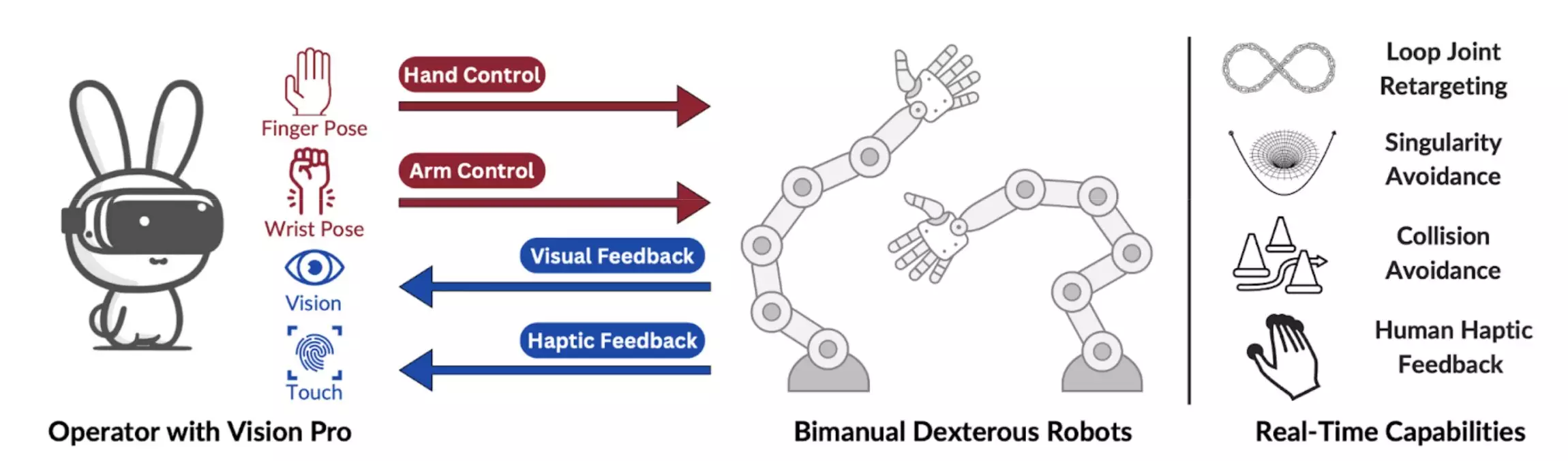
Bunny-VisionPro comprises three essential components: an arm motion control module, a hand and motion retargeting module, and a haptic feedback module. These components work together to translate human gestures and movements into robotic actions, ensuring real-time control with minimal delay and enhanced safety measures. Wang explained that the system is designed to handle singularity and collision issues effectively, providing users with a seamless teleoperation experience while preventing accidents and collisions.
One of the standout features of Bunny-VisionPro is its emphasis on safety and performance optimization. Unlike previous teleoperation systems, this new solution incorporates haptic feedback and visual cues to enhance the user’s teleoperation experience. By striking a balance between safety measures and performance optimization, Wang and his team have created a system that allows for precise control of robot arms and hands while minimizing delays and errors. This advancement is crucial for the successful integration of teleoperation systems in real-world robotic applications.
The introduction of Bunny-VisionPro marks a significant milestone in the field of imitation learning and robotic teleoperation. By simplifying the process of collecting human demonstrations, this system has the potential to revolutionize how robots are trained and programmed. Wang envisions deploying Bunny-VisionPro in robotics labs worldwide and exploring further enhancements that leverage tactile information for enhanced precision and adaptability. This ongoing research could pave the way for the development of more immersive and efficient teleoperation systems in the future.
Bunny-VisionPro represents a cutting-edge advancement in the realm of robotic teleoperation and imitation learning. By addressing key challenges in teleoperation systems and prioritizing safety, performance, and user experience, this system holds great promise for the future of robotics. As researchers continue to refine and expand the capabilities of Bunny-VisionPro, we can expect to see further breakthroughs in robotic control, manipulation, and imitation learning, propelling us closer to a future where robots seamlessly integrate into various aspects of our daily lives.
Leave a Reply