Human beings often move with remarkable ease and accuracy, even in complex environments filled with obstacles. For instance, reaching for a book on a cluttered shelf seems instinctual and effortless. However, beneath this superficial simplicity lies a sophisticated interplay of cognitive processes involving planning, spatial awareness, and dynamic reaction to unexpected changes in the environment. This capability has long posed challenges for robotics researchers, who strive to equip machines with similar dexterity and adaptive movement skills. Motion planning in robotics—a method that enables robots to retrieve or manipulate objects while avoiding obstacles—has traditionally relied on rigid algorithms that struggle to cope with unpredictability.
The Challenge of Motion Planning in Robotics
The field of robotics has made significant strides in constructing machines capable of performing specific tasks. However, when it comes to motion planning, many existing systems face limitations. Classic algorithms require immense computational resources and time, often relying on exhaustive collision checks that paralyze their efficiency. This inadequacy is particularly noticeable in environments that are unstructured or new to the robotic system. Murtaza Dalal, a doctoral student from Carnegie Mellon University’s Robotics Institute (RI), emphasizes this dilemma, noting that existing motion planning techniques quickly unravel when navigating unfamiliar surroundings. In essence, navigating the clutter of real-life environments remains a significant hurdle for robots.
In a bid to address these challenges, researchers at Carnegie Mellon University have developed an innovative model dubbed Neural Motion Planning. This cutting-edge approach aims to enhance robots’ interaction with diverse and unpredictable domestic environments like kitchen shelves, dishwashers, and similar spaces. Neural Motion Planning leverages a robust artificial intelligence network to facilitate real-time motion planning adaptable to previously unseen scenarios, a departure from traditional methodologies that often falter in such contexts.
This novel strategy draws inspiration from the human learning process, wherein individuals refine a skill through practice and exposure. Just as humans graduate from tentative movements to fluid actions, Neural Motion Planning empowers robots to exhibit versatility and adaptability in their interactions—an essential quality for any functioning machine operating in everyday settings.
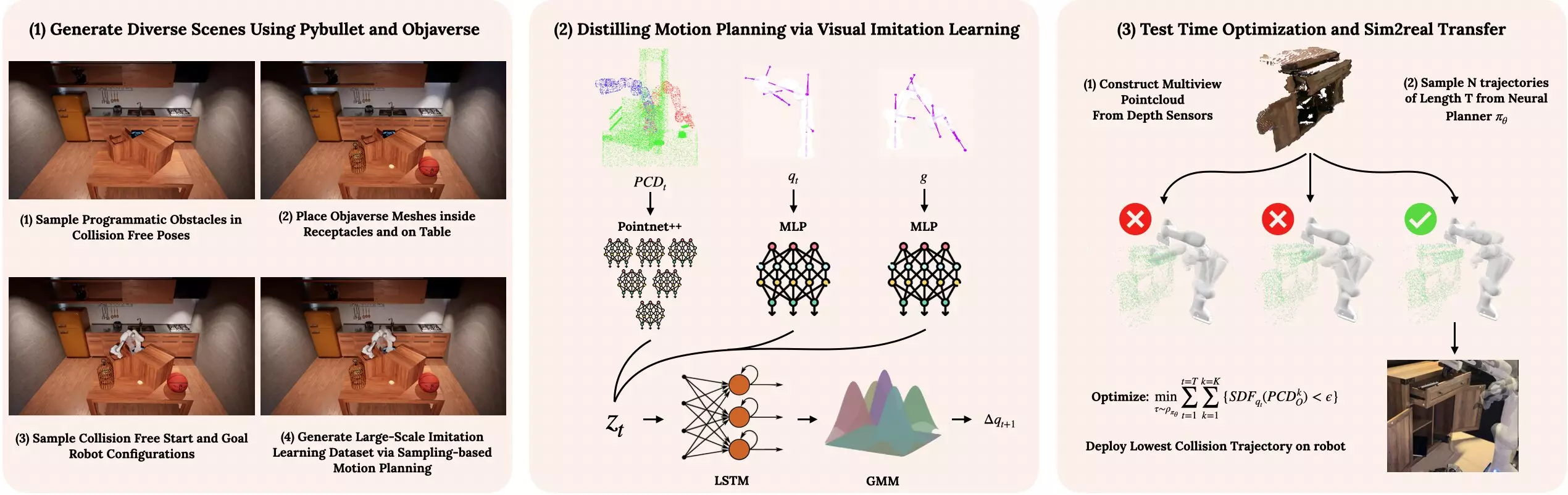
The development of Neural Motion Planning involved rigorous and extensive simulations where robots navigated complex and varied environments. Researchers constructed millions of simulated scenarios, embedding mock objects typical of household debris, including pets, decorative items, and furniture, to evaluate and enhance the system’s resilience. The essence of these simulations was to imbue the algorithms with the capability to perform reactive and rapid motion planning, resulting in a generalized policy applicable in real-world situations.
The implications of such adaptability are profound. By leveraging these simulations, robots can store and utilize a wealth of experiences, enabling more proficient performance across a variety of tasks. Unlike traditional models, which often require retraining for new environments, Neural Motion Planning allows for smoother transitions and functionalities in diverse settings.
Trials conducted in laboratory settings showcased the efficacy of Neural Motion Planning. Utilizing depth cameras, researchers provided a robotic arm with a three-dimensional perspective of its environment, defining a clear starting point and targeted goal position. The beauty of this approach lies in its simplicity; the algorithm autonomously generates precise joint configurations for the robotic arm, enabling it to navigate through cluttered spaces with finesse.
The success of Neural Motion Planning is marked by its ability to effortlessly avoid various household obstacles—be it a lamp, plant, or cabinet door—demonstrating a vital advancement in robotic interaction with the real world. As Jiahui Yang, an RI master’s student, notes, the excitement surrounding these developments stems from witnessing a singular model expertly manage diverse challenges typically encountered in modern homes.
While massive advancements have been made in artificial intelligence—such as models that excel in language and visual tasks, like ChatGPT—the field of robotics still holds substantial opportunities for growth. The insights gained from Neural Motion Planning pave the way toward creating more advanced, adaptable robotic systems. This groundwork sets the stage for subsequent innovations that could eventually enable robots to autonomously operate alongside humans, transforming everyday life and expanding the horizons of what machines can achieve. The future of robotics promises a shift towards greater integration and sophistication, with Neural Motion Planning as a critical stepping stone in this transformative journey.
Leave a Reply