In the realm of robotics, especially soft robotics, the development of flexible and adaptable components is paramount. One promising innovation that has emerged is the fabric-based soft pneumatic actuator (FSPA), which relies on the principles of inflation and deflation to create movement. These actuators have gained traction due to their potential applications that require safe interaction with humans and delicate objects. The significance of FSPAs extends from wearable technology to robotic assistance, providing solutions that traditional rigid components cannot achieve. However, creating FSPAs that can reliably perform controlled movements and adapt to various conditions poses a significant challenge. A recent study published in Scientific Reports sheds light on a breakthrough that could fundamentally enhance the design and manufacture of these essential robotic elements.
At the heart of this research lies Alan Turing’s theory of morphogenesis, which details how natural patterns — such as stripes on animals or spiral shapes in shells — can emerge from uniform distributions through reaction-diffusion models. Turing patterns arise when two substances interact; one promotes growth while the other suppresses it, leading to complex, stable formations. This fascinating mathematical framework has now been ingeniously applied to the design of FSPAs. By employing gradient-based orientation optimization methods, researchers have begun to manipulate the surface textures of these actuators, allowing them to achieve desired movements more effectively.
Dr. Masato Tanaka and his colleagues from Toyota Central R&D Labs in Japan and Toyota Motor Engineering & Manufacturing North America have articulated a motive that resonates deeply within the soft robotics community. Their goal is not merely to innovate for the sake of novelty but to meet a recognized need for cost-effective, easily producible actuators capable of dynamic shape morphing. Their work is emblematic of a broader trend in engineering: the quest for simplicity in mechanisms that can yield complex results.
The conventional approach to constructing FSPAs often involves the use of isotropic materials — those that exhibit the same properties in all directions. While effective, this homogeneity can hinder the development of actuators capable of precise, controlled movements. The reliance on trial-and-error methods complicates and extends the design process, making it both time-consuming and economically taxing. Dr. Tanaka emphasizes that the challenge is primarily rooted in the necessity for designs that not only respond uniformly to pressure but can also bend or twist in specific, predictable manners.
The breakthrough presented by the research team lies in the transition from traditional isotropic materials to anisotropic designs, which allow for variation in material orientation. This change presents a significant challenge, one that the researchers address through the automation of design processes. By utilizing Turing patterns, they provide a structured framework that minimizes the unpredictable nature of traditional methods.
To develop their advanced FSPAs, the team’s innovative approach encompasses multiple phases, beginning with the optimization of material orientation. Utilizing nonlinear finite element methods, they designed specific textures based on mathematical models of anisotropic reaction-diffusion systems. These optimized textures ensure that the actuators can deform precisely as intended, enhancing their usability across applications.
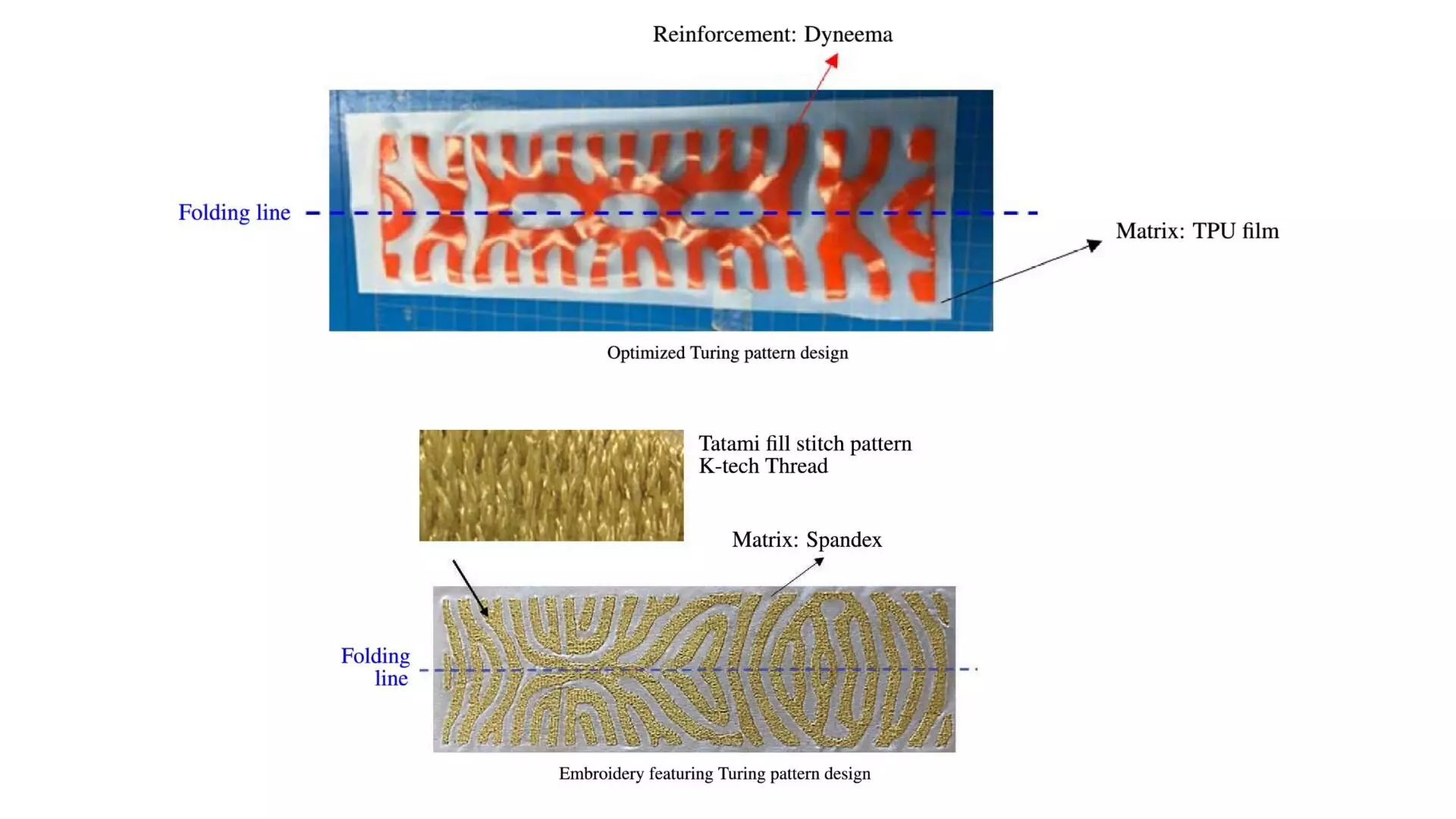
For the fabrication process itself, the researchers explored innovative methods such as heat bonding and embroidery. Heat bonding involves cutting a rigid material into Turing patterns and fusing it with softer substrates, while embroidery incorporates stiff threads into soft fabrics to create regions of varying stiffness. This dual-faceted approach not only streamlines production but also enhances the potential for cost-effective mass manufacturing.
Preliminary tests comparing the new Turing pattern designs with traditional FSPA architectures demonstrate promising results. The researchers noted that for particular applications, such as twisting movements and C-shaped designs, the Turing patterns outperformed classical designs, showcasing a decrease in actuator edge distance by approximately 10%. Moreover, the newfound capabilities suggest that a variety of motions can now be achieved through simplified pneumatic controls.
Looking forward, the research team is excited about the potential to integrate their Turing pattern methodologies with innovative materials like shape memory alloys and electroactive polymers. Such combinations could lead to the next generation of soft pneumatic actuators with enhanced movement dynamics. In addition, the prospect of incorporating advanced fabrication technologies such as 3D printing suggests that the future could bring about an era of finely tuned, highly efficient actuators that meet diverse consumer and industrial demands.
The integration of Turing patterns into the design of soft pneumatic actuators represents a significant leap forward in soft robotics. As researchers continue to explore the intersection of advanced mathematical models and practical fabrication techniques, the potential for innovative applications expands. The contributions of Dr. Tanaka, Dr. Nomura, and Dr. Song indicate not only a bold step in actuator design but also a pathway toward a future where robotics can evolve to be more useful, user-friendly, and adaptable than ever before.
Leave a Reply