Over the years, roboticists have been working tirelessly to design robotic grippers that are effective in manipulating various objects. Grippers inspired by human hands have shown promise in tackling complex object manipulation tasks. However, these grippers often come with advanced mechanisms and expensive components, making them impractical for large-scale deployment. Recently, researchers at Purdue University and MIT have introduced a simpler yet equally effective robotic gripper that aims to bridge the gap between high DOF dexterous hands and traditional one DOF parallel-jaw grippers.
The newly developed gripper features 5 DOF and consists of two fingers attached to a gripper base. The gripper’s design allows for easier control through programming tools, while still being able to perform human-like in-hand manipulations. A vision-based tactile sensor on the left fingertip provides important sensory data about the grasped object’s geometry, orientation, and grip force. The combination of a gripper base with one DOF and finger actuators with rotational servo motors allows for the gripper to achieve a high level of dexterity during manipulation tasks.
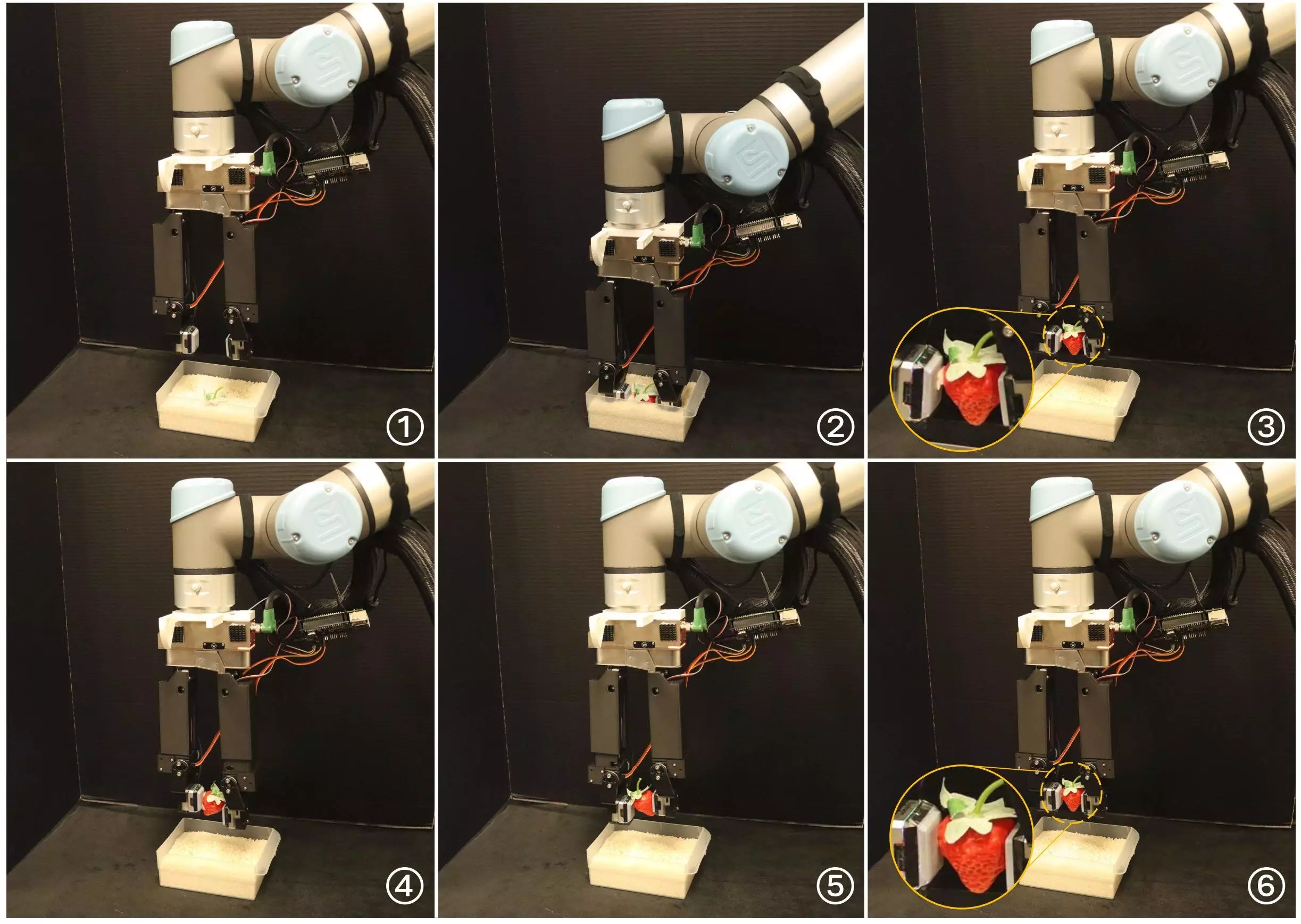
Initial real-world experiments conducted by the researchers demonstrated the gripper’s ability to go beyond the basic manipulation skills of simple grippers with fewer DOF. The gripper successfully completed singulation and scooping tasks, showcasing its potential in handling intricate object manipulation tasks. For example, the gripper could replicate human motions such as rubbing away sand particles stuck between an object’s surface and its fingers. This ability highlights the gripper’s potential to perform tasks that are typically challenging for traditional robotic grippers.
One of the key advantages of the newly developed gripper is its cost-effectiveness and energy-efficiency. By simplifying the gripper’s design and control mechanisms, the researchers have created a robotic solution that is not only easier to implement and maintain but also more robust and efficient. The reduction in complexity paves the way for simpler controller design, making the gripper an ideal choice for a wide range of applications requiring object manipulation.
The robotic gripper introduced by the research team holds great promise for further development and application in complex object manipulation tasks. Its success in initial experiments opens up opportunities for exploring more challenging tasks that were previously out of reach for traditional grippers. The underlying design of the gripper could also inspire the development of similar robotic systems that are both cost-effective and efficient. With ongoing research and development, the potential for the gripper to revolutionize the field of robotics is significant.
A groundbreaking discovery by scientists at the University of Manchester is poised to reshape the…
In an era marked by rapid ecological change, the quest for understanding environmental pollutants like…
The meteoric rise of artificial intelligence (AI) technologies is not without significant implications on our…
The landscape of quantum computing is on the verge of transformative progress, fueled by groundbreaking…
Schizophrenia is not merely a mental health issue; it is a multifaceted condition that wreaks…
Recent scientific research has illuminated the intricate web that ties our dietary choices to the…
This website uses cookies.


