Quadruped robots have become increasingly popular in various industries and military applications due to their ability to perform tasks that are unsafe or challenging for humans. However, most of these robots have a fixed strong and stiff back, which limits their nimbleness and agility. In an effort to overcome this limitation, a team of roboticists at the Technical University of Munich and Sun Yat-sen University has developed a quadruped robot with a flexible spine and tail. This innovative design aims to mimic the structure and movement of real four-legged animals, ultimately improving the overall performance of the robot.
One of the main insights of this research team was the recognition that virtually every four-legged animal possesses a flexible spine. Unlike the fixed back commonly found in existing quadruped robots, animals’ spines are composed of segmented bones, allowing for flexibility and movement. By incorporating this feature into their robot design, the researchers aimed to enhance the robot’s nimbleness and ensure smoother and more natural movements.
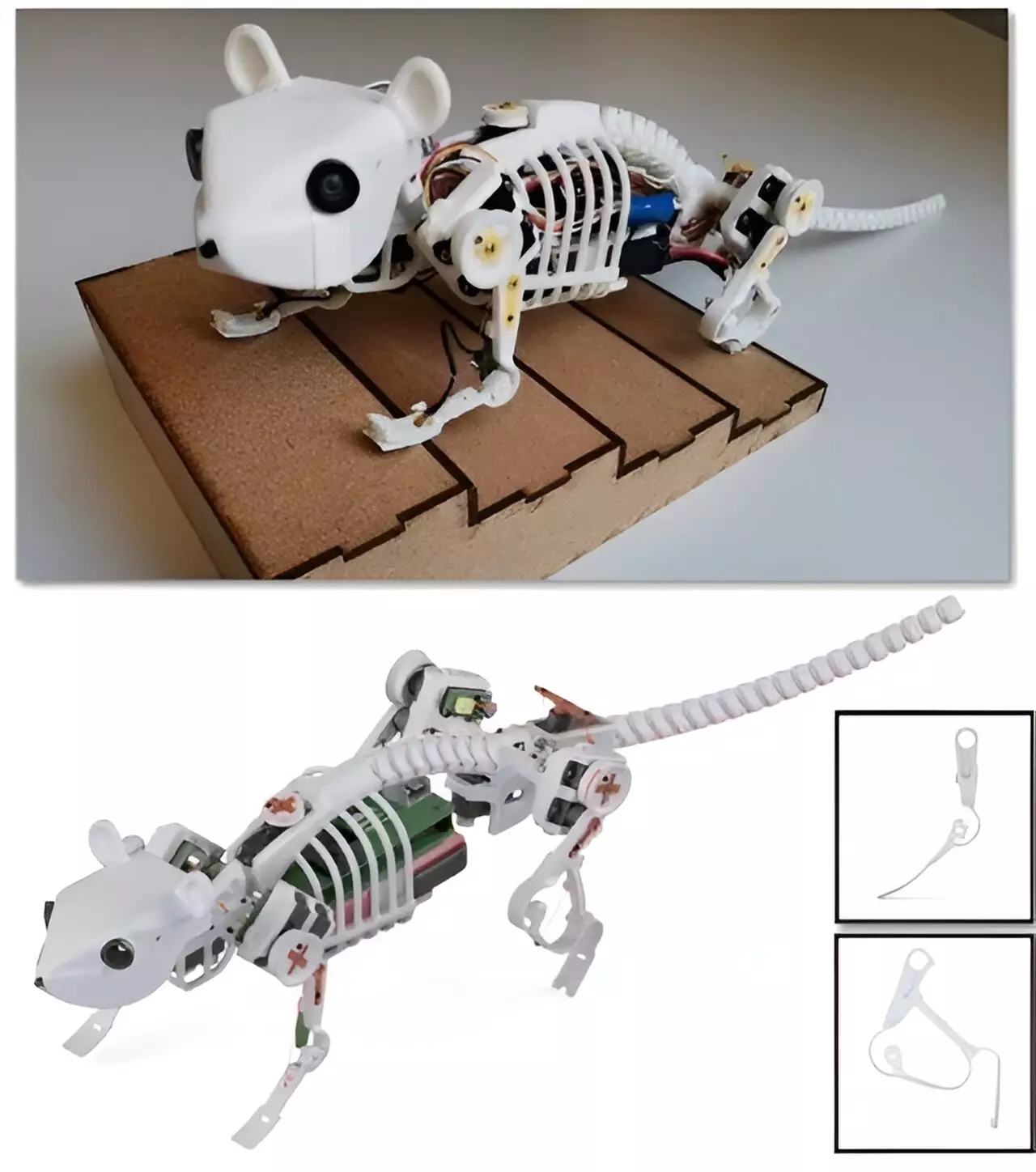
The team of roboticists designed their robot to closely resemble a mouse. The plastic head attached to the front of the robot was specifically modeled after the head of a mouse. However, the overall appearance of the robot is more akin to an animated skeleton, with segmented plastic bones resembling those of a real mouse spine. Additionally, the inclusion of plastic ribs and a segmented tail further mimic the anatomy of a four-legged animal. The legs and paws, however, differ greatly from those of a real mouse; they are designed to be more like springy prosthetic legs and feet worn by human amputees.
The primary advantage of the flexible spine and tail in the robot design is the reduction in complexity of the legs. The flexible spine absorbs some of the forces generated during locomotion, allowing for a more refined movement pattern. This means that computational processing and communication between the limbs are not required to the same extent as in robots with fixed backs. Instead, the robot can rely on the mechanical advantage provided by the flexible spine to maintain stability and perform tasks more efficiently.
To assess the impact of the flexible spine and tail, the research team conducted a series of tests on their mouse-like robot. The robot was tasked with four exercises: walking, balancing, turning, and maze navigation. Each exercise was performed twice, once with the spinal system turned on and once with it turned off. The results showed a significant improvement in performance with the system activated. Notably, the robot was able to navigate the maze an average of 30% faster when the flexible spine was engaged.
The addition of a flexible spine and tail to quadruped robots represents a significant advancement in the field of robotics. By emulating the natural structure and movement of four-legged animals, these robots can achieve greater nimbleness and agility. The reduced complexity of the legs, coupled with the mechanical advantage provided by the flexible spine, allows for more refined movements and improved performance. As roboticists continue to explore ways to bridge the gap between robots and living organisms, the incorporation of flexible spines may become a standard feature in future quadruped robot designs.
The battle against antimicrobial resistance (AMR) has become one of the paramount public health challenges…
In our relentless pursuit of healthier lifestyles, the craze for sugar alternatives has become a…
As climate change continues to wreak havoc globally, Africa's vulnerability makes it imperative for nations…
The realm of quantum technology has long been hailed as the next frontier in scientific…
The fascination surrounding black holes often breeds misconceptions, particularly the idea that they obliterate not…
In a groundbreaking endeavor, researchers at Trinity College Dublin have merged the worlds of chemistry…
This website uses cookies.

